Aquatic Rover Control System (ARCS)
User Interface Design for Robotic Algae Detection
Made using Figma, Canva, and HTML
Developed a user interface for a robotic boat designed to autonomously monitor and treat harmful algae blooms in Morningside Park, NYC, informed by NASA’s Human Interface Guidelines and other technical standards. The new interface consolidates manual and autonomous navigation, real-time data displays, and emergency alerts into one efficient, user-centered system.
Project is a conceptual display for the class MECEE4811 (Aerospace Human Factors Engineering) with Professor Mike Massimino.
Overview
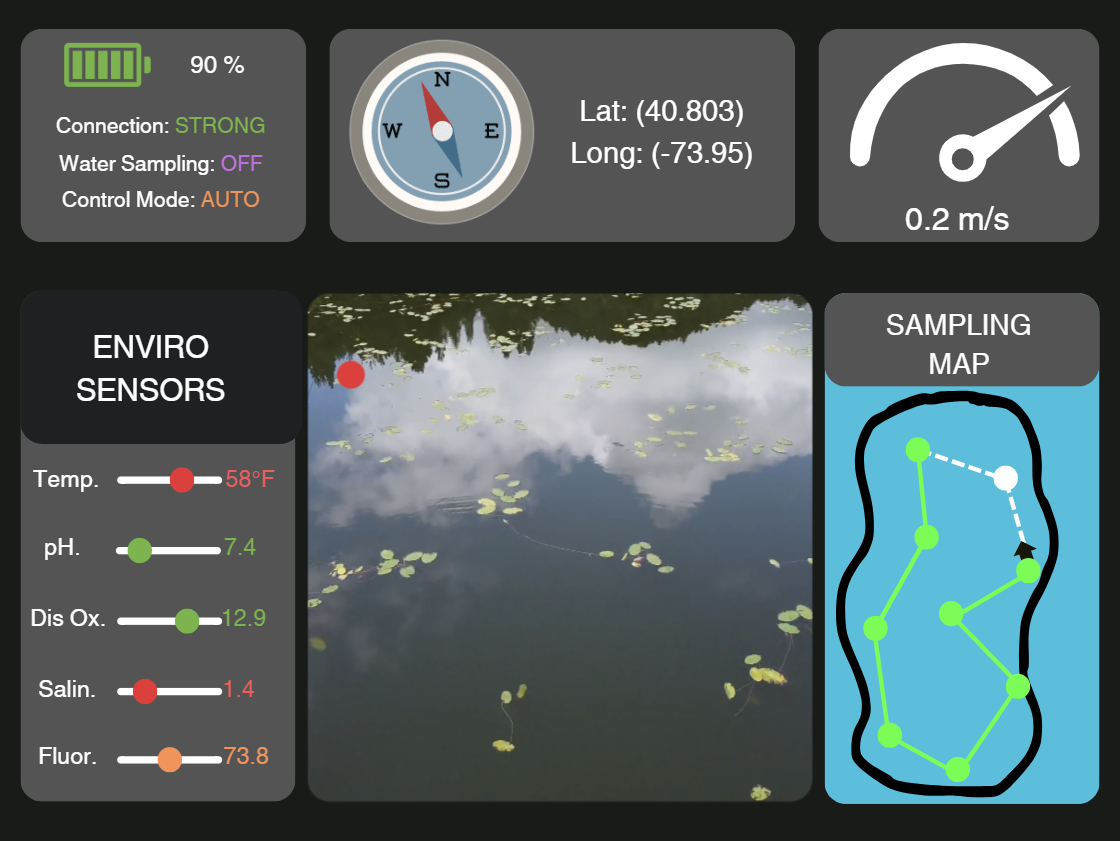
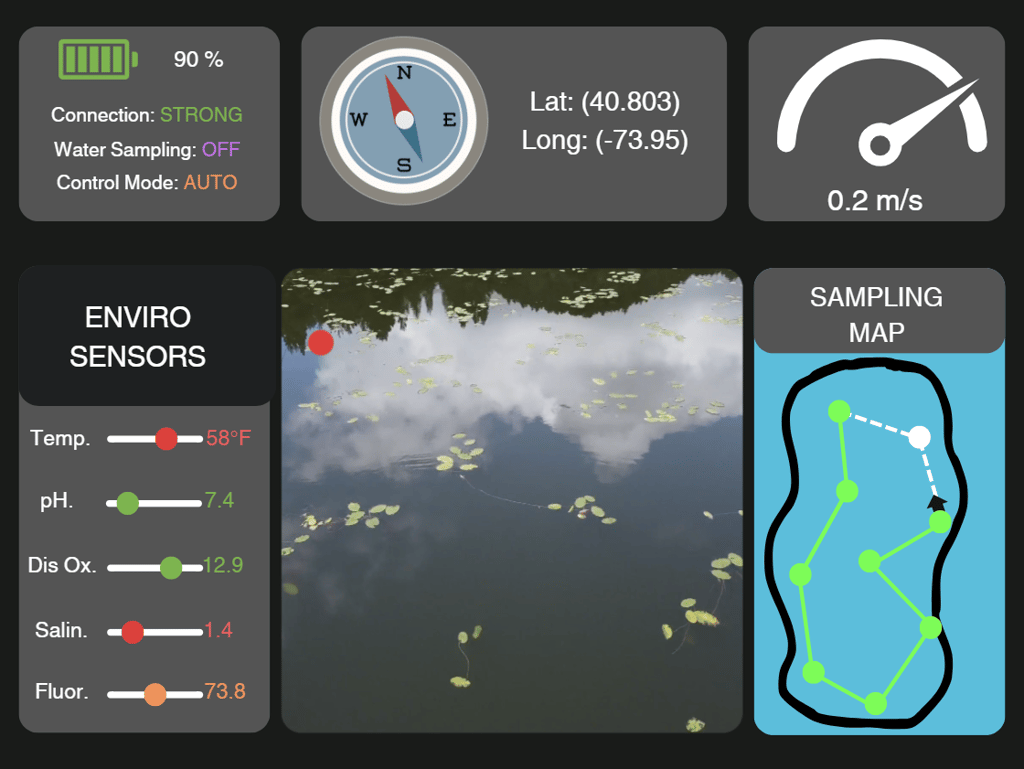
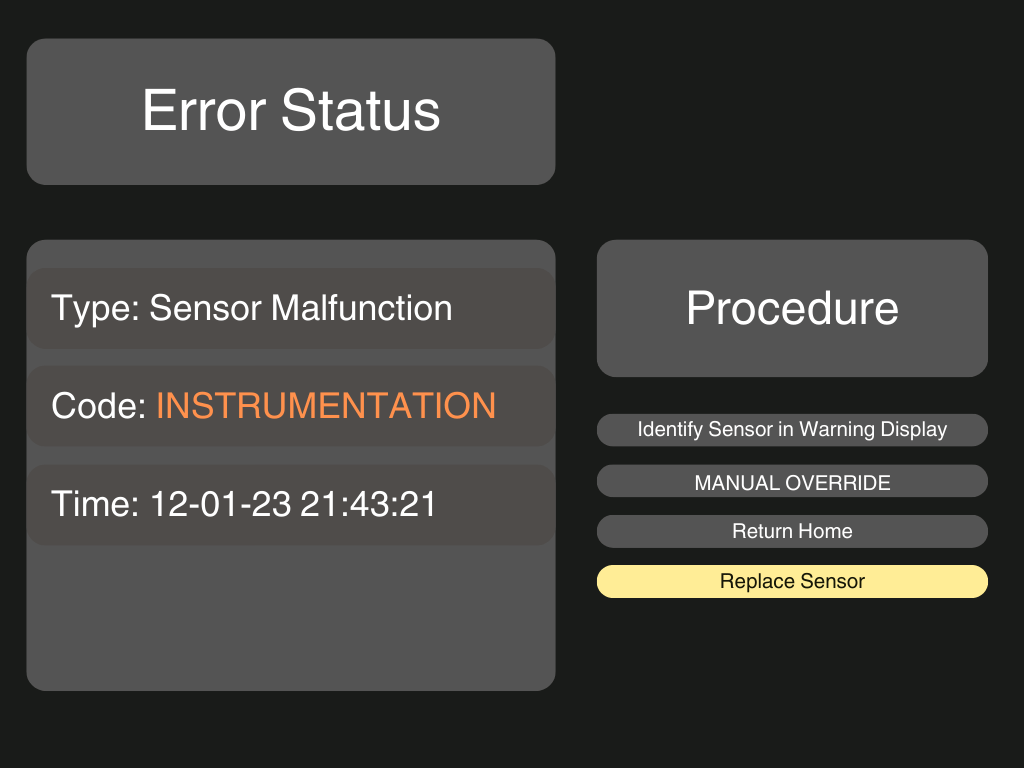
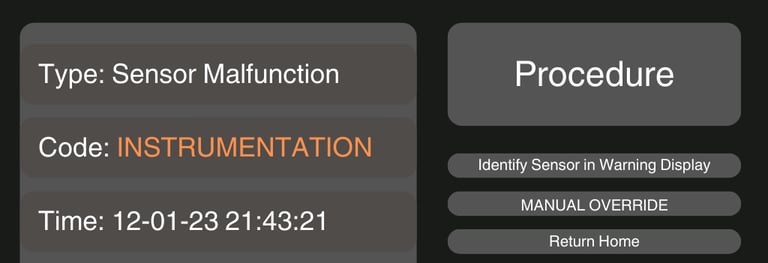
Integrated Display: Combines camera view, route map, sensor data, and system status into one screen, minimizing toggling and clutter.
Design References: Based on established guidelines for optimal text size, spacing, and color coding to ensure high contrast and clear presentation of critical information.
Real-Time Monitoring: Displays live video feed, environmental sensor data, and emergency alerts, using color coding to distinguish between regular data and urgent alerts.
Design Choices: The use of color and layout maximizes visibility and ensures users can easily differentiate information at a glance.
User-Centered Design Principles: Key principles like legibility, redundancy, and minimized information access costs guided the design to create a smooth user experience even in high-stress scenarios.
Standards Referenced: Includes principles from cockpit and control room interfaces, integrating haptic feedback and control layouts that prioritize quick access to critical information.
Experimental Validation
Background
Before our redesign, the original controller used a basic RC transmitter, which lacked flexibility and readability.
Key limitations included poor color usage, low discriminability, and a small, cluttered display area.
Based on design principles informed by NASA’s Human Interface Guidelines and other standards, we developed a user-centered interface to improve readability, reduce cognitive load, and streamline access to essential functions.
Key Features and Technical Standards
Objective: The interface design was experimentally validated to ensure usability and efficiency, and assess information access cost and readability of the integrated display versus a multi-screen layout.
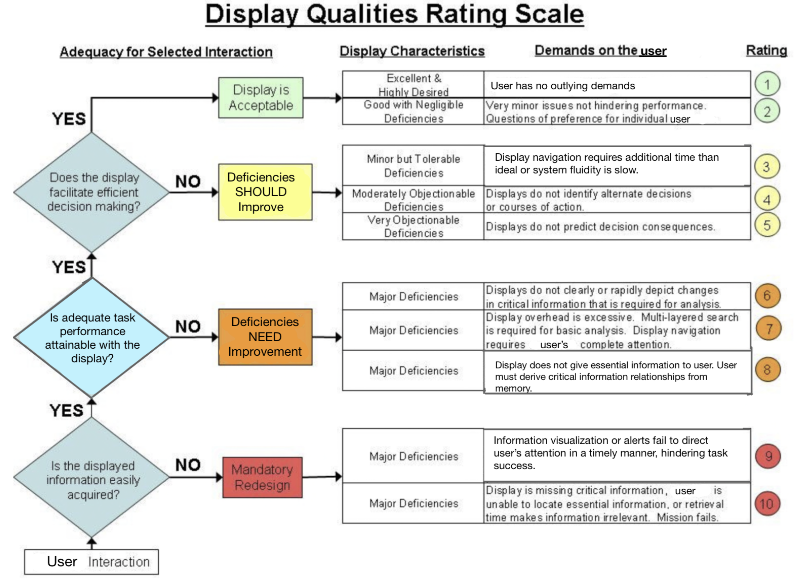
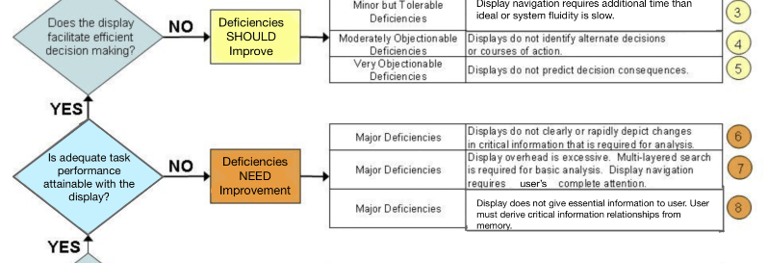
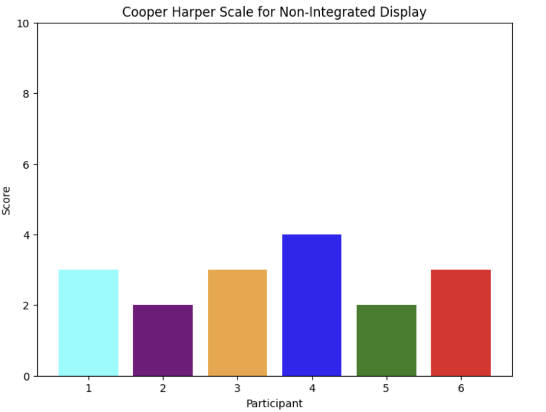
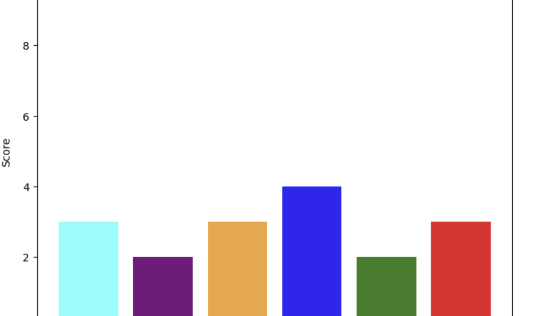
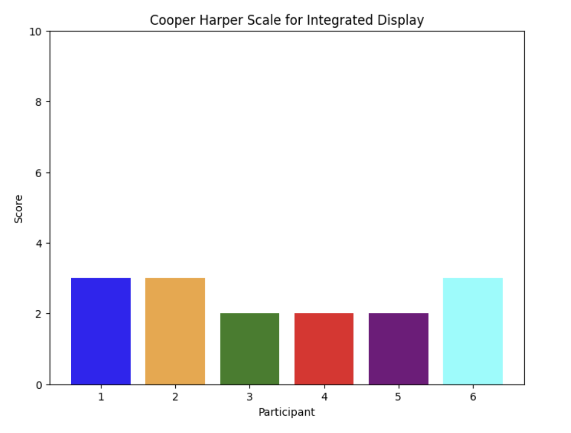
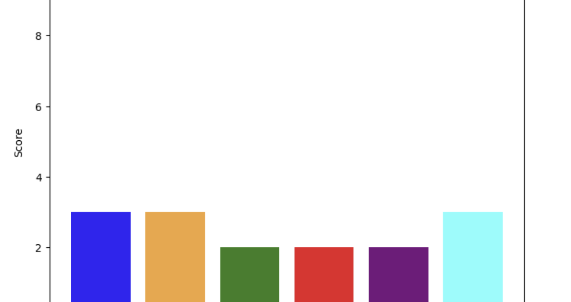
Methodology: Six team members completed standardized tasks (e.g., identifying data points) on each interface type. Task completion time and readability were measured using a modified Cooper Harper scale.
Modified Cooper Harper Scale
Efficiency: Users completed tasks 17 seconds faster on average with the integrated display, demonstrating lower information access cost.
Readability: The integrated display received a higher readability score, confirming improved usability without sacrificing clarity.
Results
This project is part of a larger environmental initiative by the CSI AQUAS team in collaboration with the Goes-Gomes Lab at Columbia University and the NYC Department of Parks and Recreation.
Environmental Context and Research

to autonomously monitor and address algae blooms in freshwater ponds, starting with Morningside Pond, just steps from Columbia’s campus.
The goal
algae blooms threaten ecosystems and public health, and the AQUAS vehicle is designed to measure water quality metrics like pH, salinity, and dissolved oxygen, while also deploying a natural treatment to remove algae.
This project represents a pioneering effort in NYC to use autonomous technology for environmental management, with the data made available to the community to promote public awareness.
Why
Presentation
