
ROAM Lab


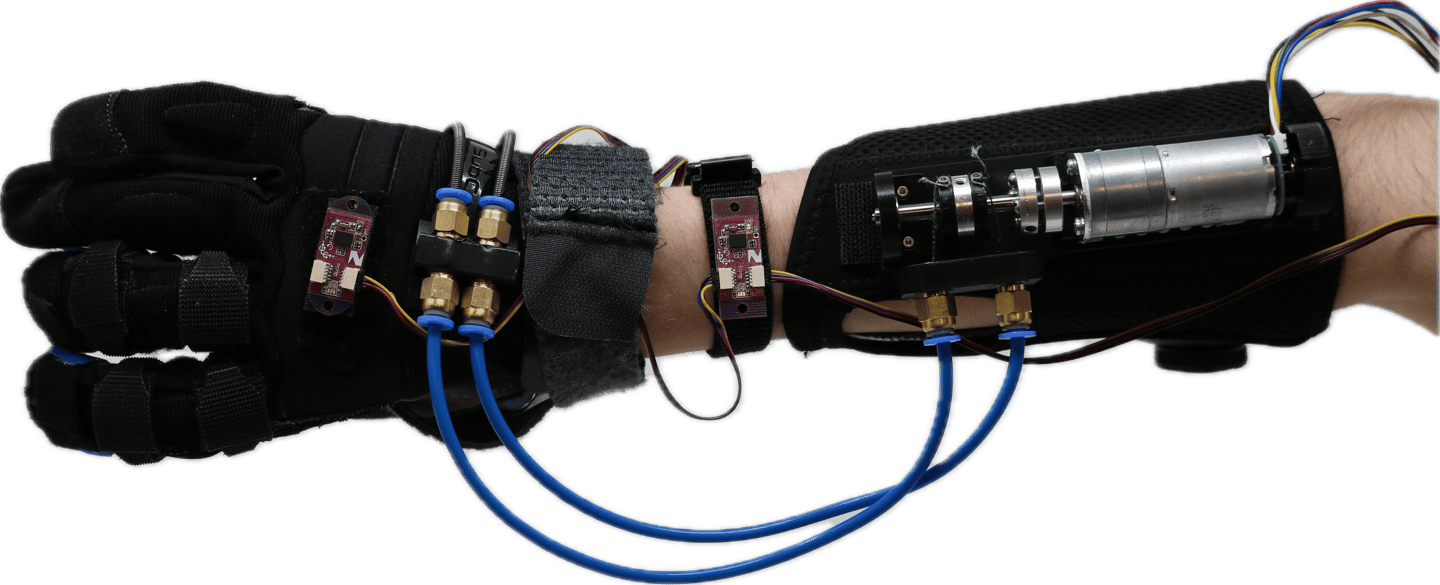
The MyHand-SCI is an assistive glove designed for C6-C7 spinal cord injury patients, featuring a DC motor controlled by IMU sensors to enable tenodesis by responding to wrist angles, allowing for improved hand grasp function.
MyHand-SCI
My role
To develop a new version of the assistive device, conduct patient sessions, and design an all-new thumb splint to assist in grasp function.

Thumb Splint
・Custom 3D printed design
・Keeps Thumb in correct position
・Functional, iterable design


New Version of the MyHand-SCI
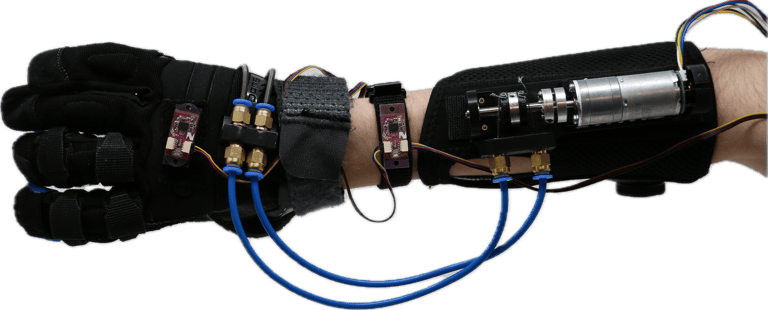
Old Version
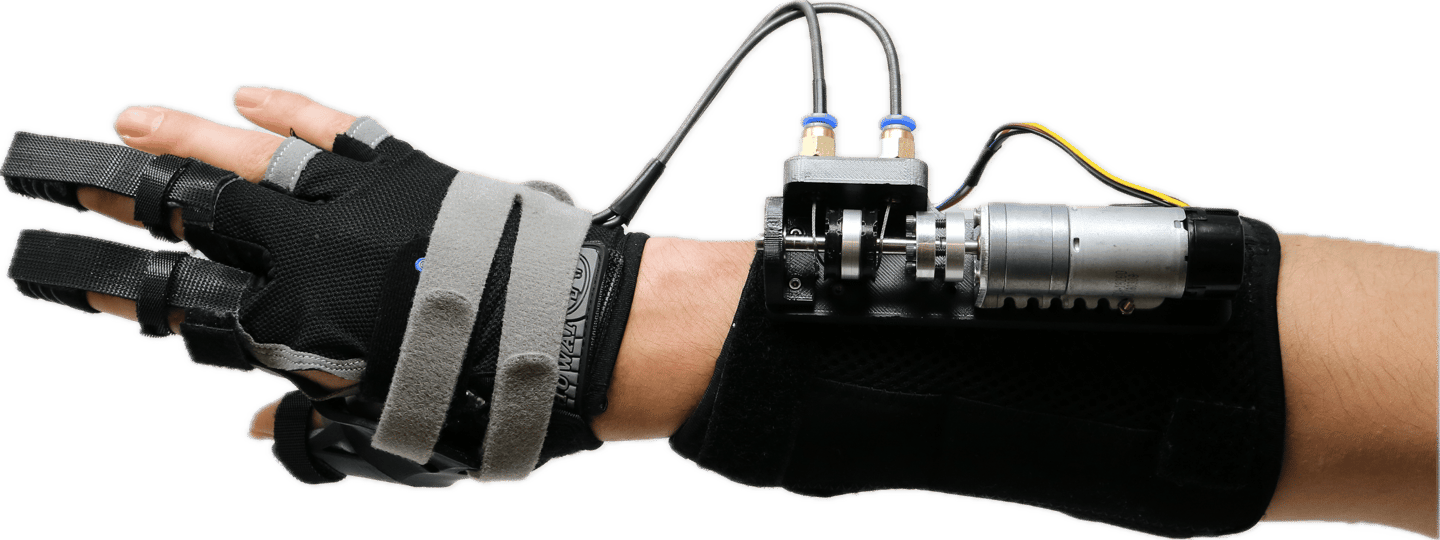
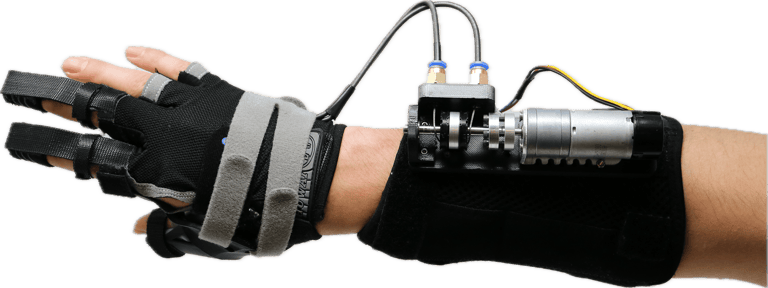
New Version
The new version of the MyHand-SCI removes significant bulk from the previous iteration and improves on the adjustability by accommodating a larger sample of hand sizes. The new thumb splint also removes bulk from the hand, is easier to put on, and maintains the thumb in the correct position.
Designed to Reduce Friction and Increase Effective Grasping Force
Replaced Bowden cables with spring-style metal sheaths to reduce stiffness and improve flexibility.
lowered friction and improved freedom of wrist movement.
Moved sheath exits closer to MCP joints
While this might seem like it would reduce the moment arm (and thus torque), the design intent was to increase effective grasping force by minimizing slack introduced by glove material compression and improving the transmission of tensile force from the motor to the fingertips.